The challenge
You are now well armed to face a challenge! Your task will be to implement the application I showed you at the beginning of this chapter.
Here’s the GIF again:
Also, this may help:
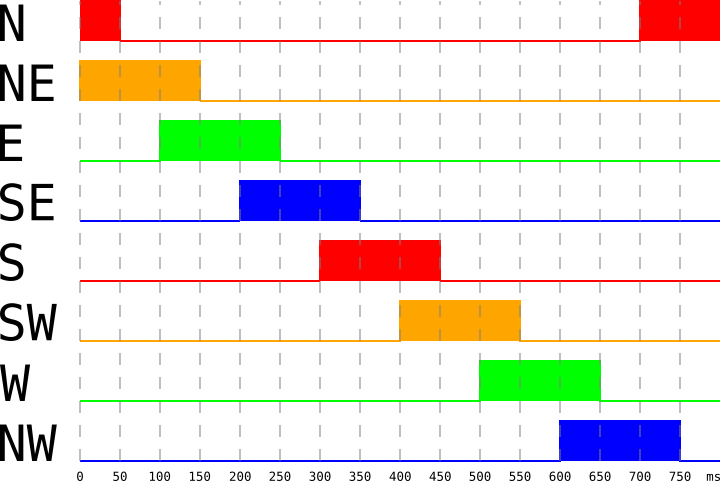
This is a timing diagram. It indicates which LED is on at any given instant of time and for how long
each LED should be on. On the X axis we have the time in milliseconds. The timing diagram shows a
single period. This pattern will repeat itself every 800 ms. The Y axis labels each LED with a
cardinal point: North, East, etc. As part of the challenge you’ll have to figure out how each
element in the Leds array maps to these cardinal points (hint: cargo doc --open ;-)).
Before you attempt this challenge, let me give you one additonal tip. Our GDB sessions always involve
entering the same commands at the beginning. We can use a .gdb file to execute some commands
right after GDB is started. This way you can save yourself the effort of having to enter them
manually on each GDB session.
As it turns out we’ve already created ../openocd.gdb and you can see it’s doing
pretty much what we did in the previous section plus a few other commands. Look at
the comments for additional information:
$ cat ../openocd.gdb
# Connect to gdb remote server
target remote :3333
# Load will flash the code
load
# Eanble demangling asm names on disassembly
set print asm-demangle on
# Enable pretty printing
set print pretty on
# Disable style sources as the default colors can be hard to read
set style sources off
# Initialize monitoring so iprintln! macro output
# is sent from the itm port to itm.txt
monitor tpiu config internal itm.txt uart off 8000000
# Turn on the itm port
monitor itm port 0 on
# Set a breakpoint at main, aka entry
break main
# Set a breakpiont at DefaultHandler
break DefaultHandler
# Set a breakpiont at HardFault
break HardFault
# Continue running and until we hit the main breakpoint
continue
# Step from the trampoline code in entry into main
step
Now we need to modify the ../.cargo/config.toml file to execute ../openocd.gdb
nano ../.cargo/config.toml
Edit your runner command -x ../openocd.gdb.
Assuming you’re using arm-none-eabi-gdb the diff is:
~/embedded-discovery/src/05-led-roulette
$ git diff ../.cargo/config.toml
diff --git a/src/.cargo/config.toml b/src/.cargo/config.toml
index ddff17f..02ac952 100644
--- a/src/.cargo/config.toml
+++ b/src/.cargo/config.toml
@@ -1,5 +1,5 @@
[target.thumbv7em-none-eabihf]
-runner = "arm-none-eabi-gdb -q"
+runner = "arm-none-eabi-gdb -q -x ../openocd.gdb"
# runner = "gdb-multiarch -q"
# runner = "gdb -q"
rustflags = [
And the full contents of ../.cargo/config.toml, again
assuming arm-none-eabi-gdb, is:
[target.thumbv7em-none-eabihf]
runner = "arm-none-eabi-gdb -q -x ../openocd.gdb"
# runner = "gdb-multiarch -q"
# runner = "gdb -q"
rustflags = [
"-C", "link-arg=-Tlink.x",
]
[build]
target = "thumbv7em-none-eabihf"
With that in place, you can now use a simple cargo run command which will build
the ARM version of the code and run the gdb session. The gdb session will
automatically flash the program and jump to the beginning of main as it step’s
through the entry trampoline:
cargo run
~/embedded-discovery/src/05-led-roulette (Update-05-led-roulette-WIP)
$ cargo run
Finished dev [unoptimized + debuginfo] target(s) in 0.01s
Running `arm-none-eabi-gdb -q -x openocd.gdb ~/embedded-discovery/target/thumbv7em-none-eabihf/debug/led-roulette`
Reading symbols from ~/embedded-discovery/target/thumbv7em-none-eabihf/debug/led-roulette...
led_roulette::__cortex_m_rt_main_trampoline () at ~/embedded-discovery/src/05-led-roulette/src/main.rs:7
7 #[entry]
Loading section .vector_table, size 0x194 lma 0x8000000
Loading section .text, size 0x52c0 lma 0x8000194
Loading section .rodata, size 0xb50 lma 0x8005454
Start address 0x08000194, load size 24484
Transfer rate: 21 KB/sec, 6121 bytes/write.
Breakpoint 1 at 0x8000202: file ~/embedded-discovery/src/05-led-roulette/src/main.rs, line 7.
Note: automatically using hardware breakpoints for read-only addresses.
Breakpoint 1, led_roulette::__cortex_m_rt_main_trampoline ()
at ~/embedded-discovery/src/05-led-roulette/src/main.rs:7
7 #[entry]
led_roulette::__cortex_m_rt_main () at ~/embedded-discovery/src/05-led-roulette/src/main.rs:9
9 let (mut delay, mut leds): (Delay, LedArray) = aux5::init();
Fork the discovery book
If you haven’t already ready, it’s probably a good idea to fork
the embedded discovery book so you
can save your changes in your own branch of your fork. We suggest creating
your own branch and leaving the master branch alone so the master branch
of your fork can stay in sync with the upstream repo. Also, it allows you to
more easily create PR’s and improve this book, thank you in advance!